Messungen unter dem Eis
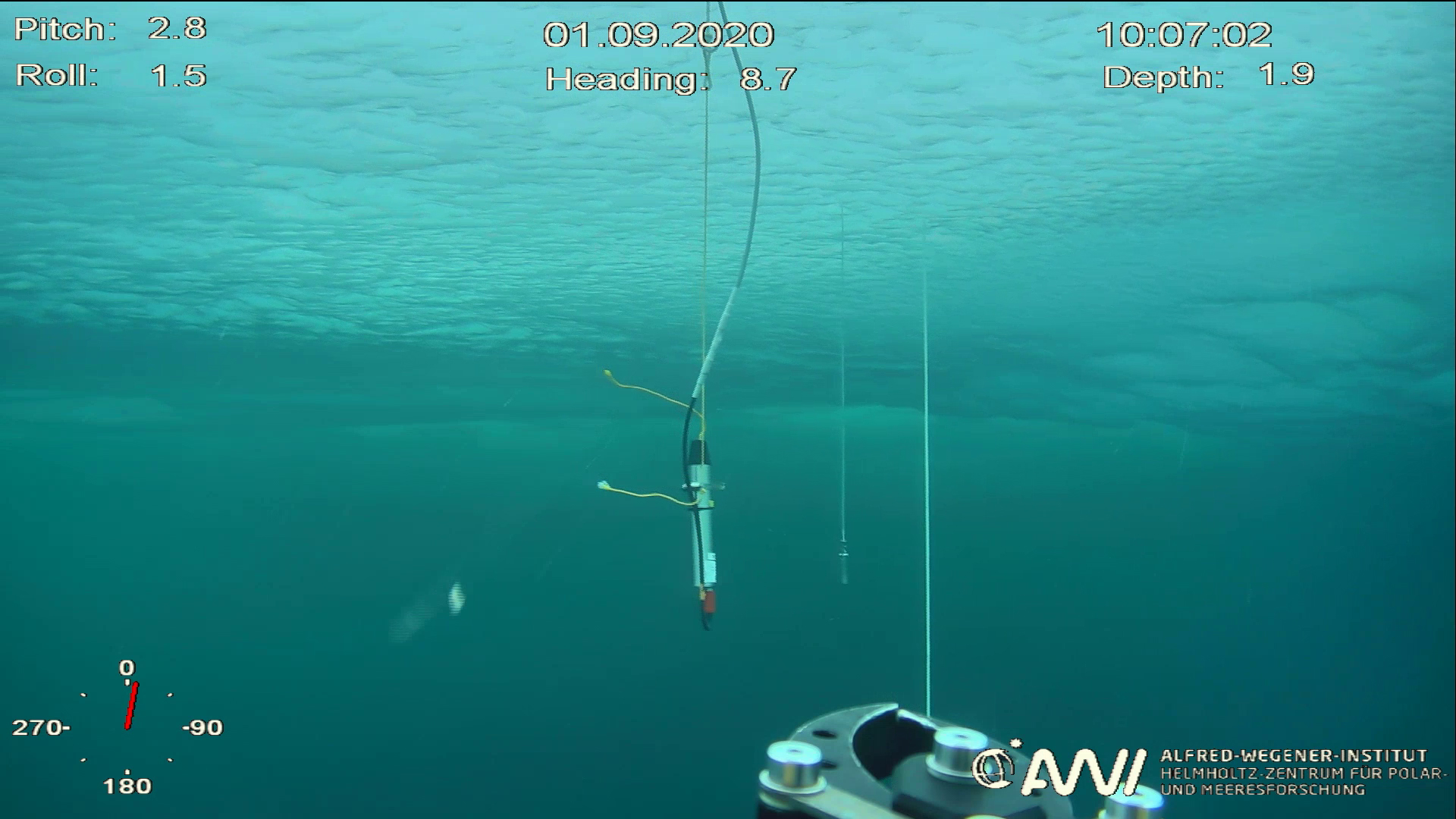
Die Unterseite des Meereises, die in direktem Kontakt mit dem darunterliegenden Ozean steht, ist für die Forschung von besonderem Interesse. Hier tritt als Folge von Entsalzungsprozessen hochkonzentrierte Sole aus, hier wächst die geschlossene Eisdecke langsam weiter und gerade hier wimmelt es nur so vor Leben. Denn die komplexe Nahrungskette nimmt an der Eisunterseite ihren Anfang. Unzählige Algen bauen hier Biomasse auf und schaffen damit eine Lebensgrundlage für eine Vielzahl von Würmern, Krebstieren, Fischlarven und Jungfischen, die direkt unter dem Eis nicht nur fressen, sondern sich hier auch vor Räubern verstecken. Gerade diese aus wissenschaftlicher Sicht hochinteressante Eisunterseite ist aber besonders schwer für den Menschen zugänglich. Hier zeigen wir Ihnen, wie es mit modernster Technologie wie den ferngesteuerten Tauchrobotern (Remotely Operated Vehicles, ROVs) gelingt, die magische Welt unter dem Eis schonend zu erforschen.
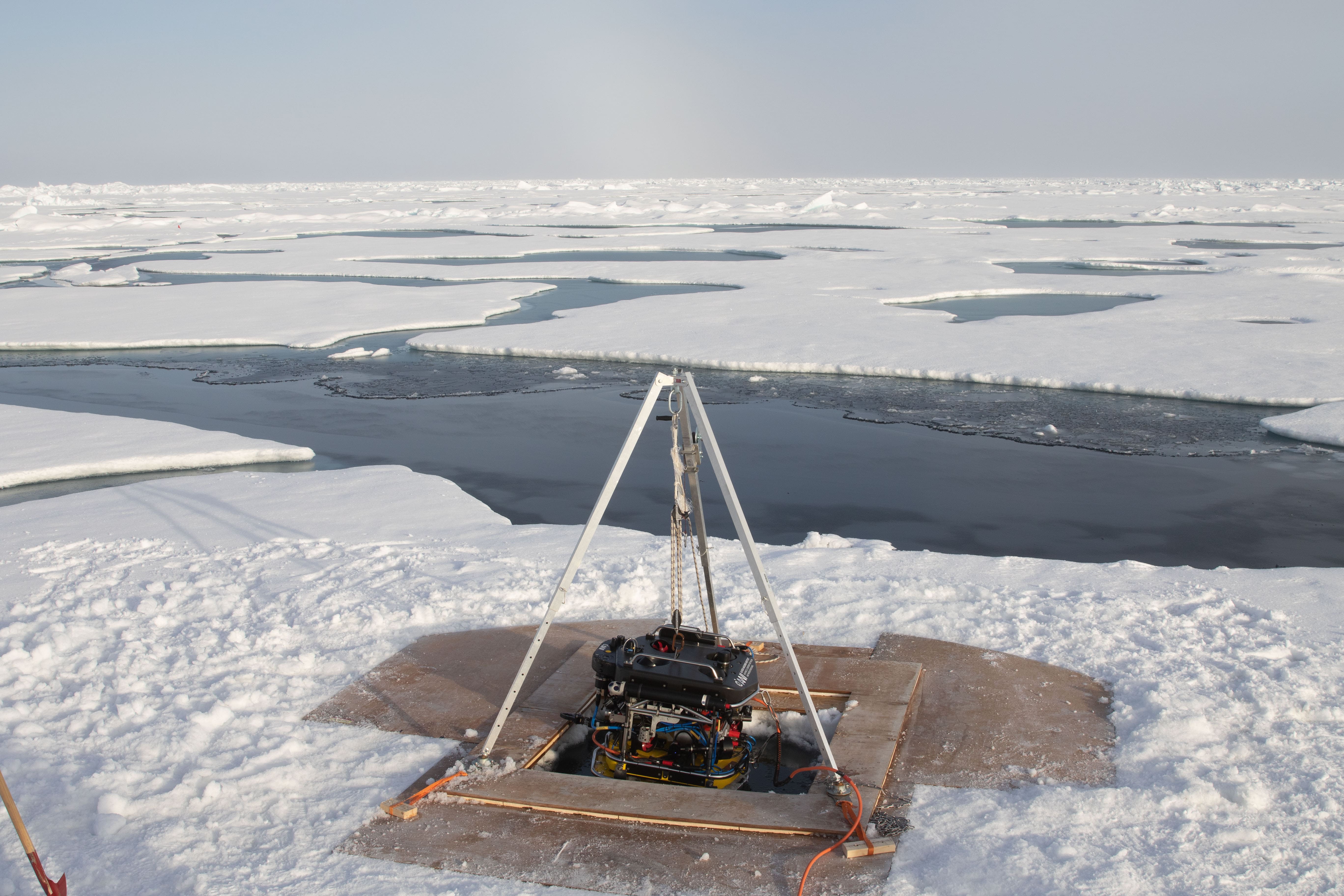
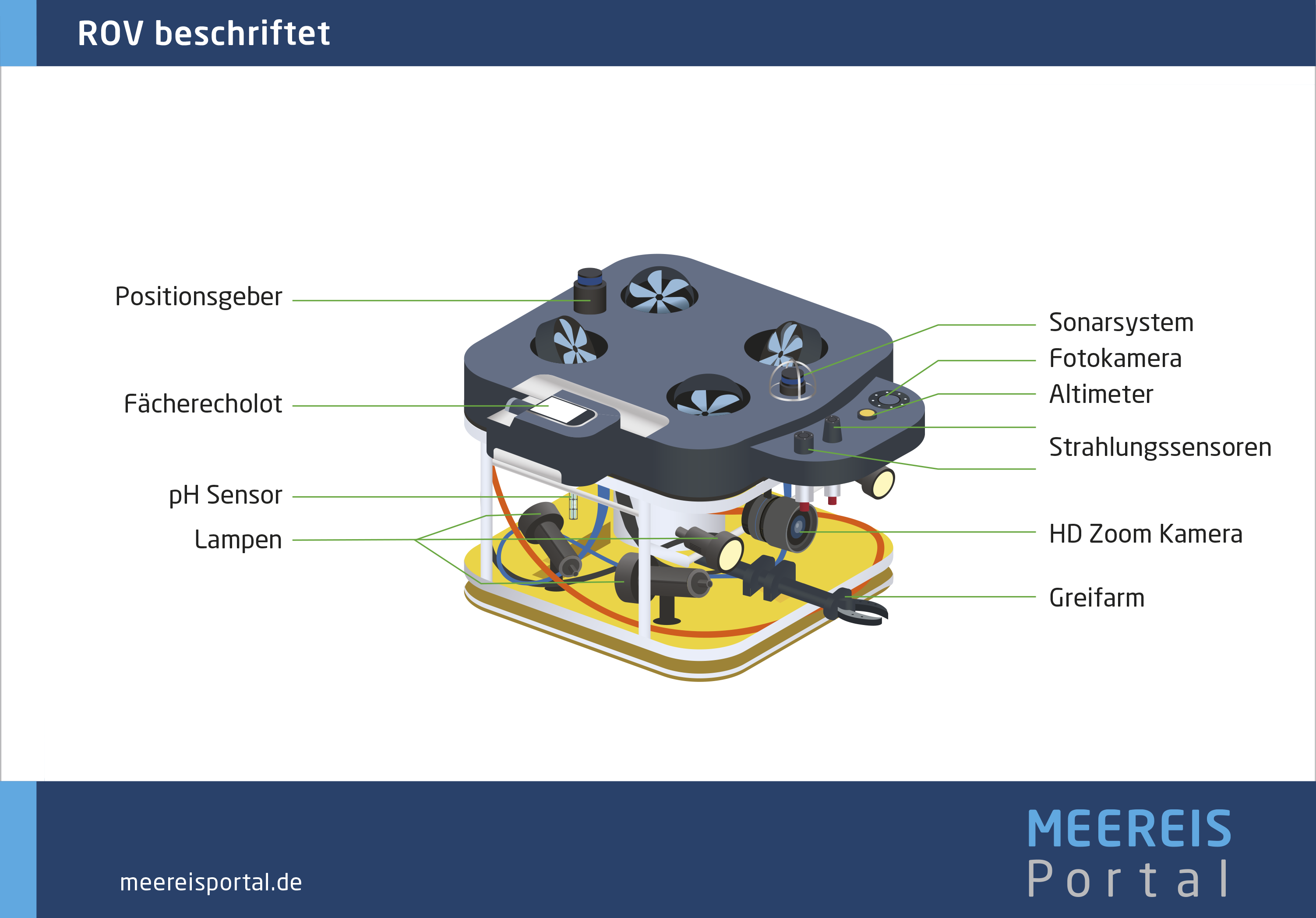
Ein „Remotely Operated Vehicle (ROV)“ ist ein Unterwasser-Tauchroboter, der an einem Kabel befestigt das Meereis von unten untersucht und dabei von einer Kontrolleinheit auf dem Meereis oder an Bord eines Schiffes gesteuert wird. Die Art der Messungen, bzw. der gemessenen Parameter, ist je nach ROV sehr unterschiedlich. Auch die Komplexität des Messsystems variiert stark und reicht von einfachen schwimmenden Kameras bis zu sehr komplexen Multisensor-Plattformen. Mit Tauchrobotern kann die nur schwer zugängliche Unterseite des Meereises wiederholt, schonend und zerstörungsfrei untersucht werden.
Die häufigsten Anwendungsbereiche von ROVs in der Meereisforschung sind:
- Video- und Fotoaufnahmen der Unterseite des Meereises
Diese werden zumeist zur Dokumentation des Tauchgangs verwendet, werden aber auch direkt ausgewertet, um beispielsweise die Verteilung von Biomasse im und unter dem Meereis zu quantifizieren. Ebenfalls lassen sich so Presseisrücken und dynamische Strukturen untersuchen und deren zeitliche Entwicklung nachverfolgen. Zusätzlich werden ROVs verwendet, um andere Sensoren und Geräte unter dem Meereis zu prüfen oder teilweise auch auszubringen oder einzuholen. - Lichtmessungen unter dem Meereis
Lichtdurchlässigkeit und Lichtintensität sind wesentliche Komponenten bei der Bestimmung der Energiebilanz des Meereises und des oberen Ozeans. Hier werden häufig spektrale Radiometer verwendet, mit denen die Lichtverhältnisse in unterschiedlichen Tiefen kartiert werden. - Dicken- bzw. Tiefgangmessungen des Meereises
Echolotmessungen ergeben den Abstand vom ROV zum Eis und gemeinsam mit der Tiefe des ROVs den Tiefgang des Meereises. Diese Messungen können als Punktmessungen oder über Fächerecholote ausgeführt werden und so die Topographie der Unterseite des Meereises kartieren. Aus Veränderungen über die Zeit lassen sich Schmelz- und Gefrierraten des Meereises ableiten. - Ozeanographische Messungen
Neben Messinstrumenten, die direkt auf die Eigenschaften des Meereises abzielen, haben viele ROV-Systeme Sensoren an Bord, die physikalische, biologische und geochemische Parameter des Ozeans erfassen – etwa den Salzgehalt, die Temperatur, den Sauerstoffgehalt oder die Menge an Chlorophyll und gelösten Stoffen in der Wassersäule. Daraus lassen sich Informationen über das Ökosystem im und unter dem Meereis ableiten. - Schleppen von Netzen
Größere Systeme können auch Netze schleppen, mit denen beispielsweise Zooplankton gefischt werden kann. Das hilft dabei, die genaue Zusammensetzung des Ökosystems zu bestimmen und nach Tiefen und Regionen unter dem Eis zu unterscheiden.
ROVs werden zumeist bei Stationsarbeiten vom Meereis aus oder direkt von Bord gesteuert. Das ROV-System besteht immer aus dem Tauchroboter selbst und einer Oberflächeneinheit, die im Wesentlichen ein großes Computersystem darstellt. Dieses System ist dafür zuständig, alle Daten für den Piloten aufzubereiten, zu visualisieren und zugleich zu speichern. Ein zentrales Element ist die Steuereinheit, die man sich wie den Controller einer Videospielkonsole vorstellen kann. Die Größe der Oberflächeneinheit reicht von einem einfachen Koffer bis hin zu Systemen, die in Kontrollständen oder -containern verbaut sind.

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}






Die polaren Ozeane erhalten Wärme aus den gemäßigten Breiten durch die Ozeanströmungen, die damit der Meereisbedeckung entgegenwirken. An den Rändern von Grönland und der Antarktis findet eine Wechselwirkung zwischen der Ozeanströmung und den Eisschilden statt. Hierdurch werden neue Wassermassen gebildet, die großen Einfluss auf die globale Zirkulation in den Ozeanen haben.
Mit den Methoden der physikalischen Ozeanographie werden Prozesse im Nordpolarmeer und im Südlichen Ozean untersucht, die zum Verständnis des Klimawandels und der Ökosysteme beitragen.
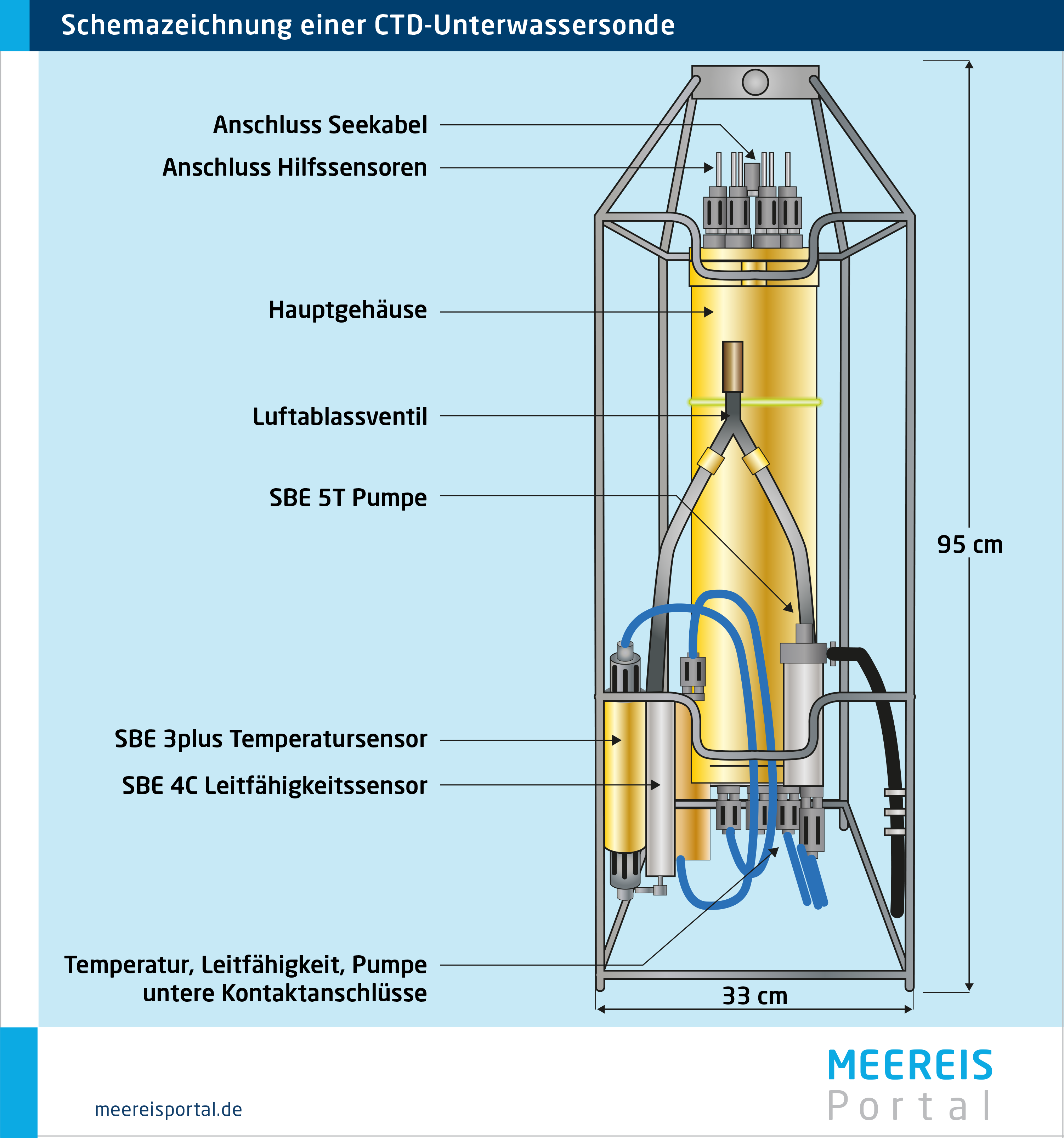
Die CTD-Sonde, oder auch Kranzwasserschöpfer genannt, misst die Leitfähigkeit und Temperatur entlang eines vertikalen Profils durch die Wassersäule. Hierfür wird die Sonde an einem Stahlseil in den Ozean bis in mehrere tausend Meter Tiefe herabgesenkt. CTD ist eine Abkürzung aus dem Englischen und bedeutet Conductivity, Temperature, Depth: Leitfähigkeit, Temperatur, Tiefe. Die gemessenen Parameter werden zur Bestimmung der Zustandsgrößen Temperatur, Druck und Tiefe verwendet. Der Salzgehalt und die Dichte des Wassers werden aus der Leitfähigkeit unter Berücksichtigung von Temperatur und Druck berechnet. Zusätzlich können während der CTD-Messungen bis zu 24 Wasserproben von jeweils 12 Litern in verschiedenen Wassertiefen genommen werden, um die jeweiligen Wassertiefen auf Spurenstoffe und Kleinstlebewesen zu untersuchen. Die gemessenen Daten werden während der Sondierung durch das Stahlseil übertragen und auf dem Schiff am Computer verfolgt. Hier wird auch entschieden, in welcher Wassertiefe eine Probe genommen werden soll. Die Probennahme erfolgt durch ein Signal vom Schiff, welches das Schließen der Flasche auslöst.
Das System besteht aus der CTD-Unterwassereinheit (SBE9plus mit jeweils angeschlossen Sensoren), der CTD-Schiffsausrüstung (z. B. die Winde), dem Wasserproben-Karussell (SBE32) mit 24 x 12-Liter-Flaschen und einem Datenerfassungscomputer.
Die CTD-Unterwassereinheit ist standardmäßig mit zwei Temperatur- (SBE3plus) und zwei Leitfähigkeitssensoren (SBE4) sowie zwei Pumpen (SBE5T) ausgestattet, die regelmäßig kalibriert werden. In der Regel sind ebenfalls ein oder zwei Sauerstoffsensoren (SBE43) angeschlossen. Mehrere externe Sensoren sind verfügbar, die in Wassertiefen bis zu 6.000 m eingesetzt werden können: Fluorometer für Chlorophyll a und farbige gelöste organische Substanz (CDOM), Transmissiometer, ein Höhenmesser, der den Abstand zum Meeresboden angibt, sowie ein mechanischer Bodendetektor.

{kind=link}

{kind=link}

{kind=link}



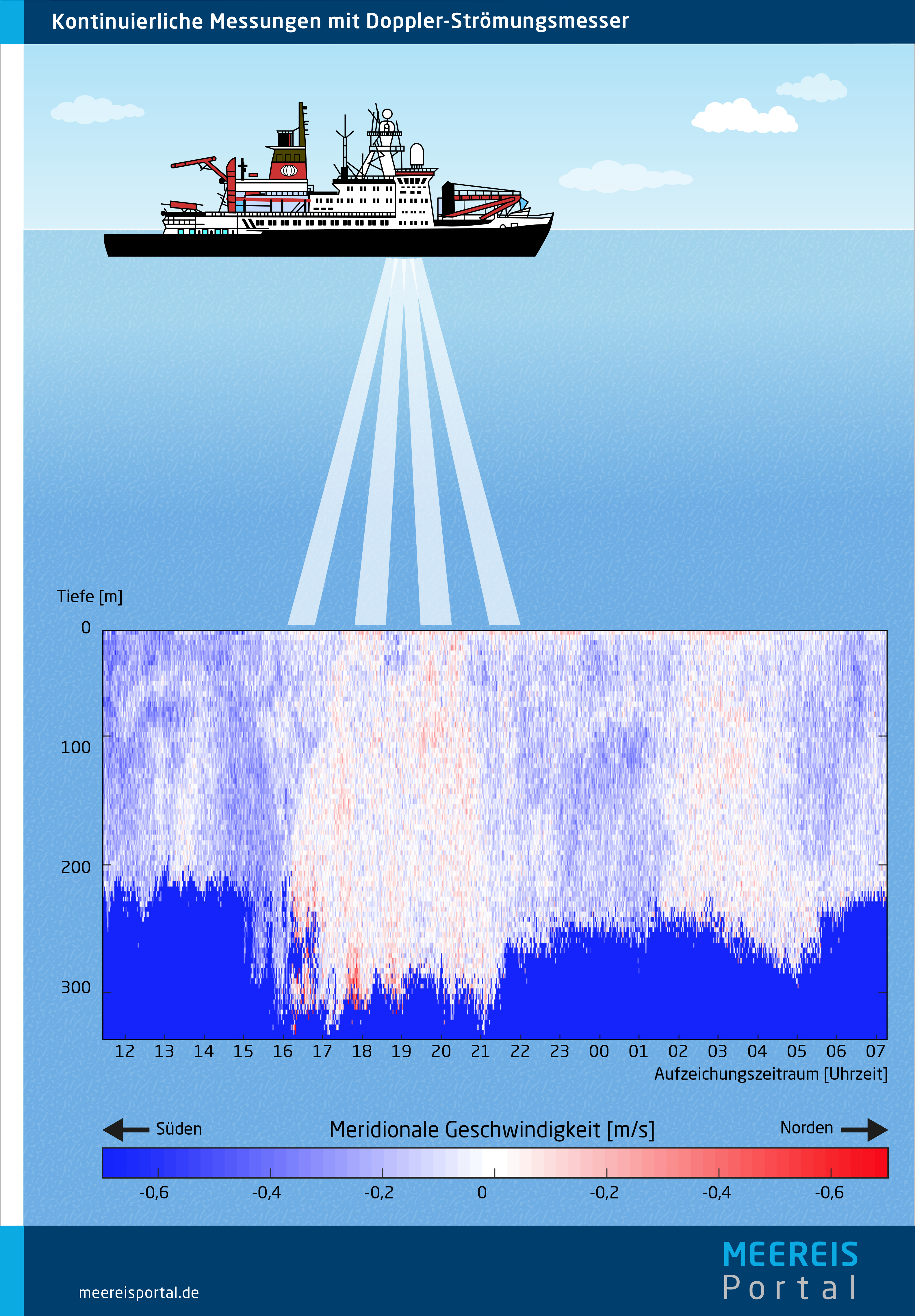
Das ADCP (Acoustic Doppler Current Profiler) wurde entwickelt, um ein akustisches Strömungsprofil über einen geräteabhängigen Tiefenbereich im Ozean zu erstellen. Zu den Hauptanwendungen des ADCP gehört die Erstellung von Zeitreihen an festen Standorten mit ozeanographischen Verankerungen sowie die Erstellung von Strömungsprofilen von fahrenden Schiffen aus mit schiffsmontiertem (VM)-ADCP. Der vertikale Bereich, den ADCPs potenziell abdecken können, hängt von der Frequenz und den reflektierenden Partikeln in der Wassersäule ab, wobei Instrumente mit höheren Frequenzen (z. B. 1200 kHz) im Allgemeinen für eine feinere vertikale Auflösung (0,5-m-Messintervall, ~10 m Reichweite) und niedrigere Frequenzen (z. B. 75 kHz) für breitere Anwendungen mit grober vertikaler Auflösung (z. B. 16-m-Messintervall) und größeren Reichweiten eingesetzt werden.
Schiffsbasierte ADCPs (VMADCP) bestehen aus dem sogenannten Schwinger (Impulsgeber), dem elektronischen Gehäuse, dem Computer im Echolotraum und dem Zusatzdisplay am Windensteuerstand. Der 150 kHz-Schwinger ist hinter einem Eisschutzfenster montiert und erreicht eine Wassertiefe von bis zu 350 m mit einer Auflösung von 4 m (Messintervall bei 1 bis 5 Knoten Schiffsgeschwindigkeit) und einer Genauigkeit von etwa 0,30 m/s für eine Single-Ping-Messung.
Hier sehen Sie eine Schemazeichnung einer schiffsbasierten ADCP-Messung. Das Forschungschiff misst während der Fahrt die Strömungsgeschwindigkeit der unter dem Schiff befindlichen Wassersäule in zwei Komponenten, der zonalen, nach Ost-West ausgerichteten Komponente sowie der meridionalen, nach Nord-Süd gerichteten Strömung. Zu sehen ist hier die meridionale Komponente. Die Doppler-Geschwindigkeitsmessung registriert je nach Frequenzgehalt Signal bis etwa 250 m oder bis 1000 m Tiefe. Deutlich zu erkennen ist, dass während der ersten Stunden eine südwärtige Stromung vorherrscht die von einer nordwärtigen abgelöst wird und später wieder ihre Richtung wechselt. Ursache können Gezeitenkräfte oder großskalige Wirbel sein. Die blaue Hintergrundfarbe in der Tiefe zeigt an, dass hier keine Geschwindigkeitsmessungen vorliegen.

Doppler-Strömungsmesser messen die Strömungsgeschwindigkeit in der Wassersäule. Dazu werden akustische Signale in festen Zeitintervallen ausgesendet, welche von Streukörpern im Wasser wie Plankton und Schwebstoffen reflektiert werden. Anhand der Doppler-Frequenzverschiebung der reflektierten Signale wird die Strömungsgeschwindigkeit berechnet. Über die Laufzeit der akustischen Signale ist eine Zuordnung zur relativen Entfernung zum Schwinger möglich.
Doppler-Strömungsmesser werden auf Englisch Acoustic Doppler Current Profiler genannt, weshalb sie mit ADCP abgekürzt werden. ADCPs können auf unterschiedlichsten Plattformen eingesetzt werden. Es gibt verschiedene Varianten von ADCPs die unterschiedliche Frequenzbereiche und Reichweiten abdecken. Die Geräte können je nach Bauart und Konfiguration die dreidimensionale Wassergeschwindigkeit in verschiedenen Tiefenhorizonten messen.

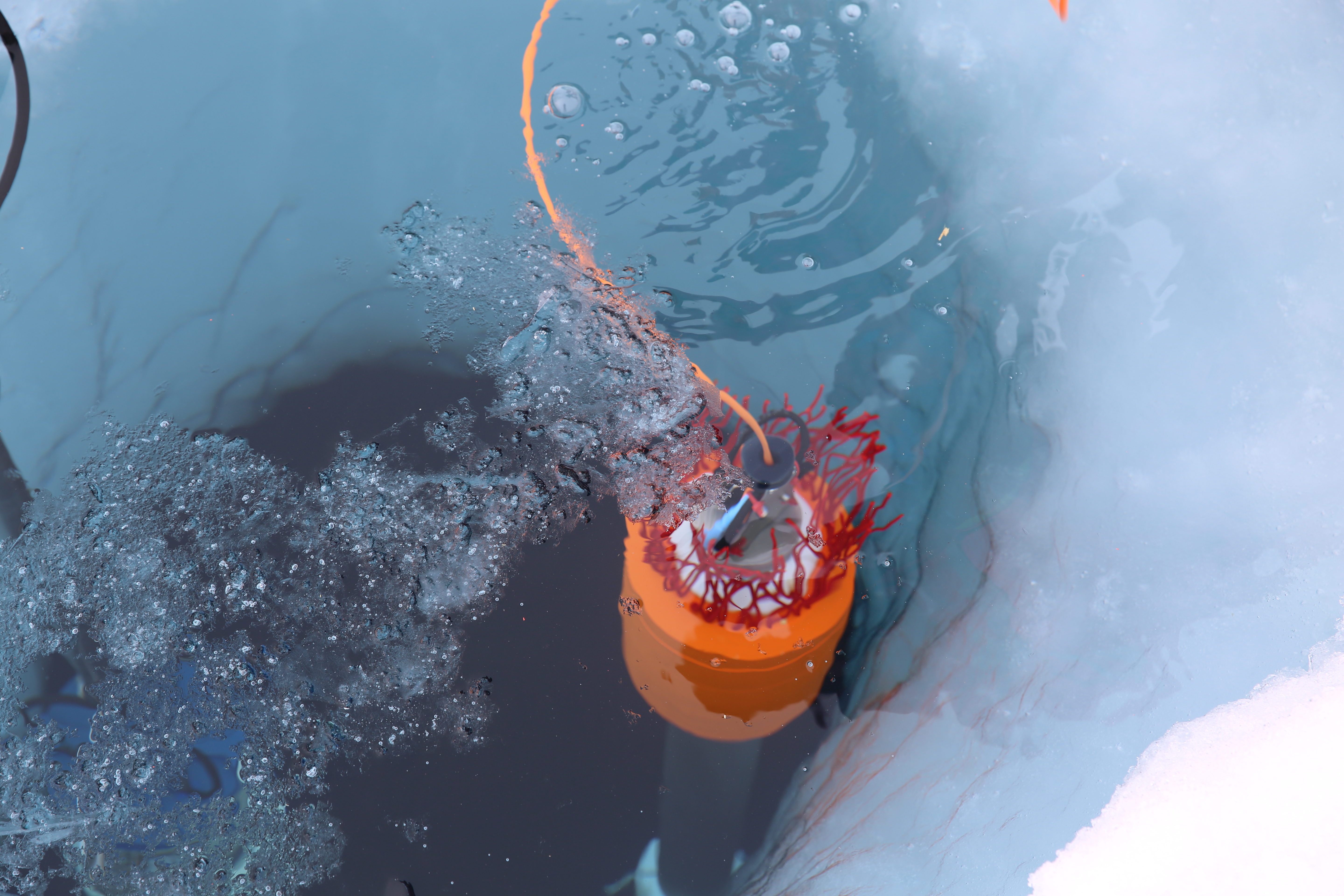
Die Mikrostruktursonde (MSS) ist ein Instrument zur Messung von kleinen Wirbeln und Turbulenzen in der Wassersäule und bietet die beobachtende Grundlage für ein verbessertes Verständnis von Vermischung und kleinskaligen Prozessen im Ozean. Die MSS ist ein mit Sensoren bestückter, 1 - 1,25 m langer Zylinder, der im Freifall mit einer Sinkgeschwindigkeit von ca. 0,7 m/s die Wassersäule profiliert. Sie Sonde ist dabei über ein Kabel mit einer Winde verbunden und sendet die gemessenen Daten in Echtzeit an einen Computer, was dem Betreiber alle relevanten Informationen (Messtiefe, Sinkgeschwindigkeit, Temperatur etc.) über den Messvorgang anzeigt. Die Messungen können je nach Einsatzort und Fragestellung entweder meereisbasiert durch ein Eisloch oder aber auch direkt von Bord eines Forschungsschiffes durchgeführt werden.
Zentrale Bestandteile der Sensorik zur Turbulenzmessung sind zwei sehr sensible Scherungssensoren, ein schneller Temperatursensor sowie ein Beschleunigungssensor, kombiniert mit Sensoren zur Messung von Leitfähigkeit, Temperatur und Druck (CTD). Die Scherung wird zusammen mit einem Mikrothermistor zur schnellen Temperaturmessung mit einer Messfrequenz von 1024 Hz (1024 Messpunkte pro Sekunde) aufgezeichnet, was bei einer Sinkgeschwindigkeit von unter 1 m/s zu einer vertikalen Auflösung im Millimeterbereich führt. Die weiteren Sensoren zur CTD-Messung zeichnen mit 24 Hz auf. Die Scherungssensoren sind sensible Stifte mit speziellen Strömungsprofilen an der Spitze (sogenannte Airfoils), die verbunden über eine spezielle Beschichtung (Piezokeramik) bereits minimale, durch kleine Wirbel im Wasser verursachte Auslenkungen aufzeichnen. Diese Parameter bilden die Grundlage für die Berechnung zur Dissipation von Energie und dem vertikalen Austausch von Wasserpartikeln. Durch die gleichzeitigen Temperatur- und Salzgehaltsmessungen können somit vertikale Wärmeflüsse bestimmt werden, die für das Verständnis des Einflusses warmer Ozeanschichten auf die Meeresoberfläche und die Meereisbedeckung wichtig sind. Zusätzlich kann die MSS optional mit Chlorophyll-, Sauerstoff-, oder Trübungssensoren bestückt werden, was wertvolle Daten für interdisziplinäre Fragestellungen zum Einfluss von physikalischen Prozessen auf biologische und biogeochemische Bedingungen liefert.
Insbesondere die kleinskaligen Prozesse werden in Ozean- und Klimamodellen oftmals nur unzureichend parametrisiert, was die Sicherheit in zukünftigen Klimaprojektionen verringert. Trotz der Dringlichkeit, mit fokussierten kleinskaligen Messungen die Modelle zu verbessern, sind Beobachtungen wie z. B. Mikrostrukturmessungen in polaren Gebieten immer noch vergleichsweise selten, nicht zuletzt auf Grund der Komplexität der Sensoren und des relativ hohen Aufwands. Die MOSAiC-Expedition legte jüngst den Grundstein für einen bisher nie dagewesenen Reichtum an Beobachtungen, zu dem auch ein hochaufgelöster MSS-Datensatz beiträgt.

{kind=link}

{kind=link}

{kind=link}

{kind=link}



