Measurements Under the Ice
The underside of sea ice, which is in direct contact with the ocean below, is of particular interest to researchers. Due to desalination processes, it is here that highly concentrated brine seeps out of the ice and here that the solid ice cover slowly grows – not to mention that it’s teeming with life. After all, the complex food web begins on the underside of the ice, where countless bacteria produce biomass, and with it, sustenance for a host of worms, crustaceans, fish larvae and juvenile fish, which not only feed just below the ice, but also use it to hide from predators. Yet as important as the underside of the ice is for researchers, it is also particularly difficult for human beings to access. Here we’ll show you how cutting-edge technologies like remote-controlled underwater robots (remotely operated vehicles, ROVs) can allow us to explore the magical world below the ice without harming it.
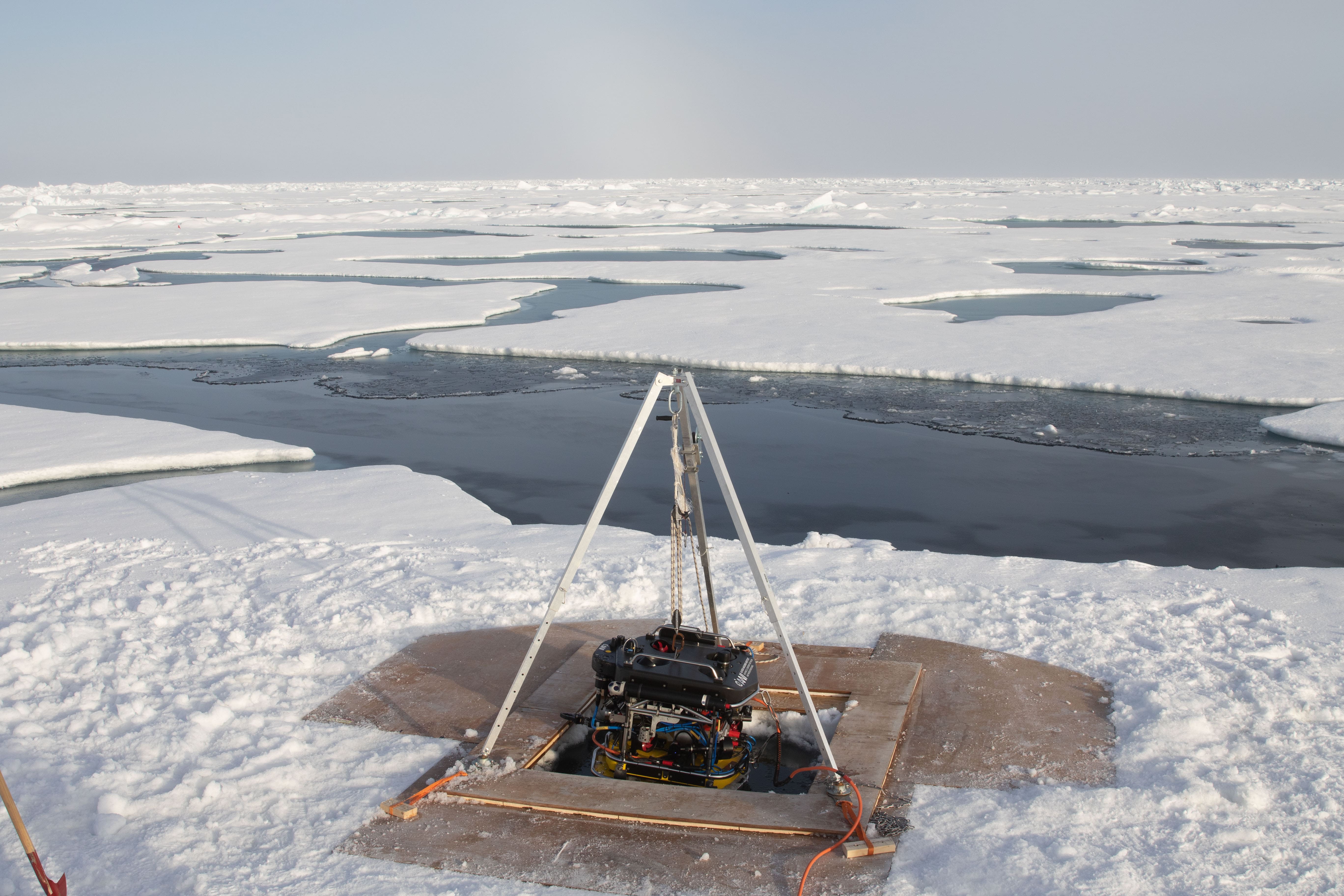
A remotely operated vehicle (ROV) is an underwater robot that, connected to a control unit on the ice or on board a ship, is used to explore sea ice from below. The type of readings taken and parameters measured differ greatly depending on the ROV. The complexity of the measuring system also varies considerably, ranging from simple floating cameras to highly complex multi-sensor platforms. With the help of ROVs, the hard-to-reach underside of the sea ice can be repeatedly explored in a non-disruptive and non-destructive way.
In marine research, the most common areas of application for ROVs are:
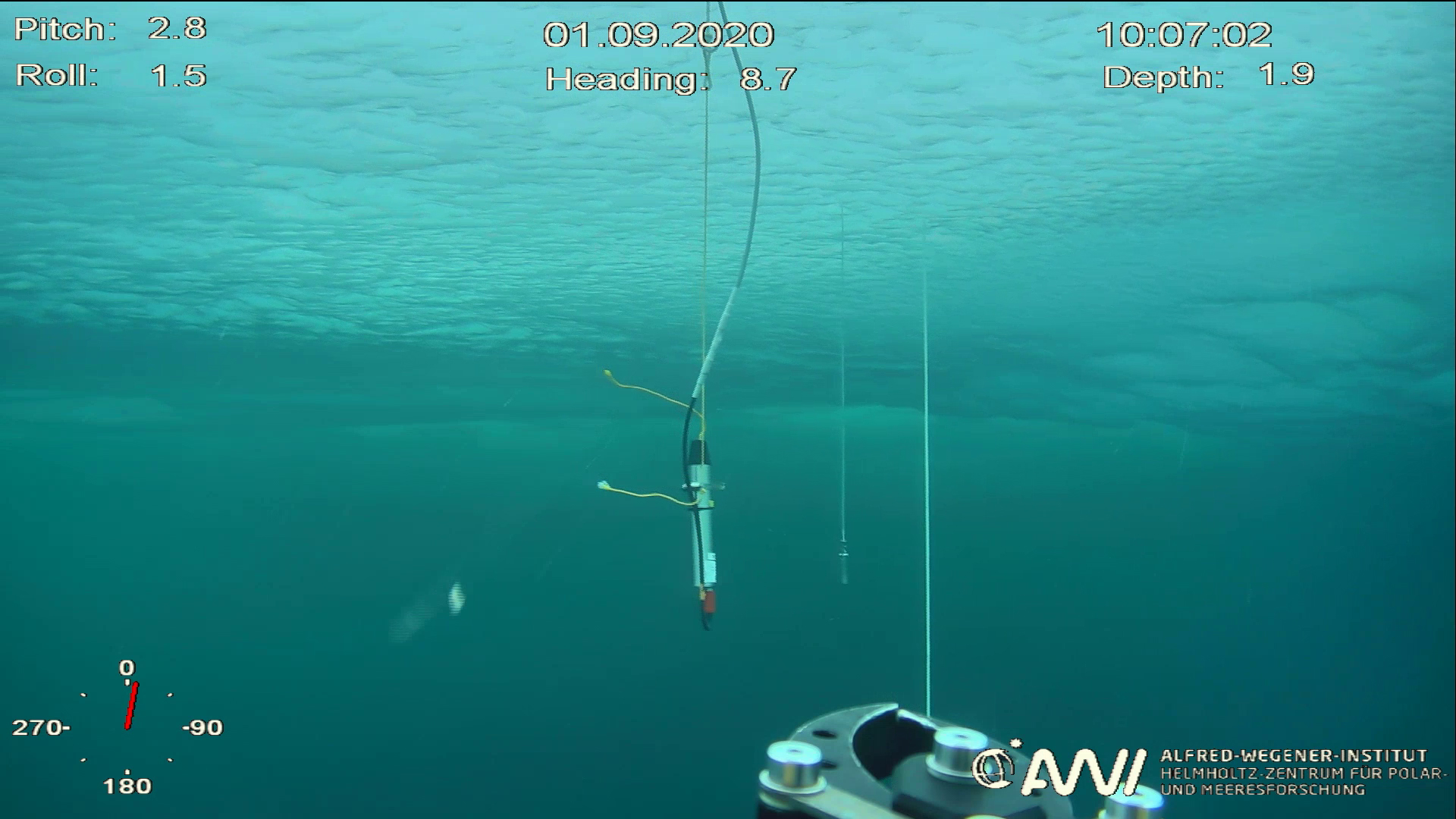
- Capturing video and photographs of the underside of the sea ice
These are most often used to document ROV dives but are also directly analysed in order to e.g. quantify the distribution of biomass within and below the sea ice. Can also be used to examine pressure ridges and dynamic structures and to track their development over time. ROVs are also used to check the status of sensors and instruments operating below the sea ice, and in some cases, to deploy or retrieve them. - Light measurements under the sea ice
Transparency and light intensity are key components in determining the energy budget of the sea ice and upper ocean. Here, spectral radiometers are often used to map the lighting conditions at different depths. - Sea-ice thickness and draft measurements
Echosounder readings measure the distance between the ROV and ice and, together with the ROV’s current depth, the sea ice’s draft. These can be taken as point measurements or via multibeam echosounders and can be used to map the topography of the underside of the sea ice. The ice’s melting and freezing rate can be deduced as changes over time. - Oceanographic measurements
In addition to measuring instruments that focus directly on the properties of the sea ice, many ROV systems include onboard sensors that record the physical, biological and geochemical parameters of the ocean – e.g. the salinity, temperature, oxygen saturation or the amount of chlorophyll and dissolved substances in the water column. This yields valuable information on the ecosystem in and below the sea ice. - Hauling nets
Larger ROV systems can also haul nets to catch e.g. zooplankton. This can help to more precisely determine the composition of the ecosystem and to distinguish between depths and regions below the ice.
ROVs are most often controlled from the surface of the sea ice (for station-based work) or directly on board. ROV systems always consist of the underwater robot itself and a surface unit that essentially represents a large computer system. This computer system prepares and visualises all data for the pilot, while simultaneously recording it. One central element is the control unit, which looks a bit like a controller for a video game console. The size of the surface unit ranges from a simple briefcase to stationary systems built into control booths or containers.

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}






The polar oceans receive heat from the temperate latitudes via ocean currents, which counteract the effects of sea-ice cover. On the coasts of Greenland and Antarctica, interactions between the ocean currents and ice sheets take place. In the process, new water masses are formed that have a major influence on global circulation in the oceans.
Physical oceanography methods are used to investigate processes in the Arctic Ocean and Southern Ocean, improving our understanding of climate change and their ecosystems.

A CTD sampler, also referred to as a rosette sampler, measures conductivity and temperature along a vertical profile in the water column. To do so, the sampler is lowered to depths of several thousand metres on a steel cable. CTD stands for conductivity, temperature and depth; the parameters measured are used to determine these three values. The salinity and density of the water are derived on the basis of the conductivity and taking into account the temperature and pressure. In addition, during a single CTD measurement, up to 24 water samples, 12 litres each, can be gathered at various depths, making it possible to gauge the presence of trace elements and microorganisms at each depth. During measurement, the recorded data is transmitted back to the ship via the steel cable, where it is monitored by a computer. The decision on which depth to sample at is also made on board. To collect a sample, the ship transmits a signal that closes the bottles on the sampler.
The system consists of the underwater CTD unit (SBE9plus with attached sensors), the CTD equipment on board the ship (e.g. the winch), the rosette carousel (SBE32) with 24 12-litre bottles, and a computer for recording the data.
The underwater CTD unit is normally equipped with two temperature (SBE3plus) and two conductivity sensors (SBE4), as well as two pumps (SBE5T), which are calibrated at regular intervals. As a rule, one or two oxygen sensors (SBE43) are also attached. Various external sensors, which can be used at depths of up to 6,000 m, are also available: fluorometers for chlorophyll a and coloured dissolved organic matter (CDOM), transmissometers, altimeters that measure the distance from the seafloor, and mechanical bottom contact detectors.

{kind=link}

{kind=link}

{kind=link}




ADCPs (acoustic Doppler current profilers) were developed to provide acoustic current profiles of device-dependent depth ranges in the ocean. Their main applications include the creation of time series for fixed sites via oceanographic moorings and creation of current profiles from on board moving vessels via vessel-mounted (VM) ADCPs. The vertical range that ADCPs can potentially cover depends on the frequency and the reflecting particles in the water column. In this regard, instruments with higher frequencies (e.g. 1200 kHz) are generally used for higher vertical resolution (0.5-m measuring interval, ~10 m range), while those with lower frequencies (e.g. 75 kHz) are used for broader applications with lower vertical resolution (e.g. 16-m measuring interval) and larger range.
Vessel-mounted ADCPs (VMADCPs) are comprised of a transducer, the electronics housing, a computer located in the echosounder room, and an additional monitor located at the winch control stand. The 150 kHz transducer is mounted behind an ice-protection porthole and can penetrate water depths of up to 350 m with a resolution of 4 m (measuring interval at speeds between 1 and 5 knots) and an accuracy of ca. 0.30 m/s for a single-ping reading.
Here you can see an overview of a vessel-based ADCP reading. While underway, the research vessel measures the flow speed of the water column below using two components: the zonal (east / west) flow and meridional (north / south) flow. Here we can see the meridional component: depending on the frequency, the Doppler speed-measuring system registers signals to depths of between 250 and 1,000 metres. As can be clearly seen, the first few hours are dominated by a southward flow, which is later replace by a northward flow before reversing again. These changes could be due to tidal forces or large-scale gyres. The blue background colour at greater depths indicates that no speed readings are available.

This Doppler current profiler measures the flow speed in the water column. To do so, it emits acoustic signals at fixed intervals, which are reflected back by objects in the water like plankton and suspended particles. The current’s speed is calculated using the frequency change in the reflected signals (Doppler effect), while the travel time of the acoustic signals allows the relative distance from the transducer to be derived.
Acoustic Doppler current profilers (ADCPs) can be used on a wide range of platforms; different variants cover different physical ranges and frequency ranges. Depending on their design and configuration, ADCPs can be used to measure three-dimensional water velocity at different scales of water depth.

The MicroStructure Sonde (MSS) is an instrument used to measure small eddies and turbulences in the water column and provides the observational basis for a better grasp of mixing and small-scale processes in the ocean. The MSS is a sensor-laden, 1- to 1.25-m-long cylinder that creates profiles of the water column as it descends in freefall (at ca. 0.7 m/s). The probe is connected to a winch-driven cable and transmits the data it measures to a computer in real-time, showing the operator all relevant information (measuring depth, descent speed, temperature etc.). Depending on the site and research focus, the measurements can be gathered by lowering the probe through a hole in the sea ice or directly from on board a research vessel.
The turbulence sensors chiefly consist of two high-sensitivity velocity shear probes, a fast temperature sensor and an acceleration sensor, combined with sensors for measuring conductivity, temperature and depth (CTD). Shear is also recorded by a micro-thermistor for fast temperature measurement with a measuring frequency of 1024 Hz (1024 measurements per second), which, at a descent speed of less than 1 m/s, yields a vertical resolution in the millimetre range. The other CTD sensors use a frequency of 24 Hz. The velocity shear probes are high-sensitivity pins with specially designed tips (airfoils) which, thanks to a special coating (piezoceramic), can detect even minimal changes caused by eddies in the water. These parameters form the basis for calculating the dissipation of energy and vertical exchange of water particles. By simultaneously measuring temperature and salinity, the MSS can identify vertical heat flows, which are important to understanding how warmer ocean layers affect the ocean’s surface and sea-ice cover. In addition, the MSS can optionally be fitted with chlorophyll, oxygen or light-transmission sensors, yielding valuable data for interdisciplinary questions on how physical processes affect biological and biogeochemical conditions.
Small-scale processes in particular are often inadequately represented in ocean and climate models, which reduces the reliability of climate projections. Despite the pressing need to improve these models with the aid of targeted small-scale measurements, observations like microstructure measurements are still comparatively rare in the polar regions, due in part to the complexity of the sensors and the relatively high amount of time and effort required. The MOSAiC expedition recently laid the foundation for an unprecedentedly diverse range of observations, including a high-resolution MSS dataset.

{kind=link}

{kind=link}

{kind=link}

{kind=link}



